디팔레타이징
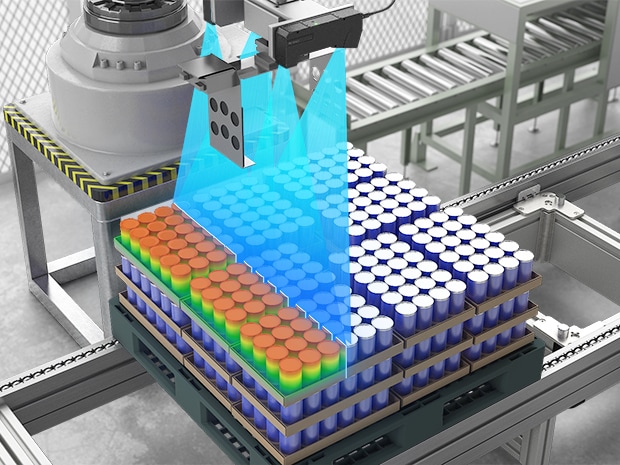
로봇을 이용한 자동 디팔레타이징(Depalletizing) 공정에서는, 팔레트에 적재된 상자를 안전하고 정확하게 피킹하는 것이 핵심입니다.
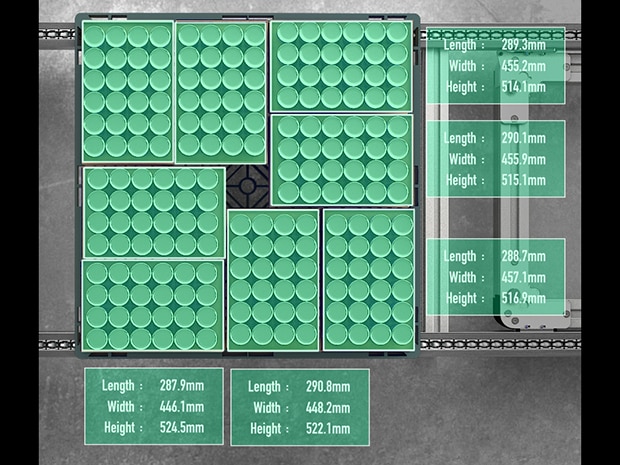
LJ-X 시리즈를 로봇에 장착하면, 피킹 직전에 팔레트 상단의 3D 형상을 실시간으로 스캔합니다. 이를 통해, 각 상자의 정확한 3차원 위치 좌표(X, Y, Z)와 기울기 정보를 취득할 수 있습니다. 이 데이터를 기반으로 로봇은 최적의 접근 경로와 파지점을 스스로 계산하여, 어떠한 적재 상태에서도 실패 없이 안정적으로 상자를 피킹하는 지능형 디팔레타이징 시스템을 구축할 수 있습니다.